2017.11.20
전체적인 프로젝트에 대해서 발표하였다.
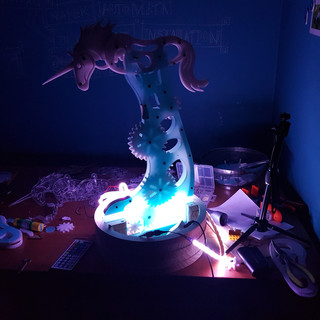
Final Project UNICON 오토마타 제작하기.
프로젝트 목표
1.메커니즘 표현을 컴퓨터로 시뮬레이션 할 수 있고 이를 바탕으로 실제 구현하여 본다.
2.오토마타 제작진행 과정을 통하여 표현아이디어를 발전시키고 구현방법을 학습한다.
프로젝트 중간점검
1.메커니즘 표현을 컴퓨터로 시뮬레이션 할 수 있고 이를 바탕으로 실제 구현하여 본다.
Fusion 360설계에 많은 시간을 할애하여 소프트웨어 활용능력이 향상되었다. Fusion 360의 전반적인 워크플로우를 자세하게 이해하게 됨으로 머신디자인과 같은 기계적 장치에 대한 아이디어를 구체화 하는데 큰 도움이 되었다. 기계적 움직임을 예측하고 설계하는데는 Jont tool과 Motionstudy부분에 대한 이해가 필요하다.
2.오토마타 제작진행 과정을 통하여 표현아이디어를 발전시키고 구현방법을 학습한다.
완벽하게 구체화 되지 않은 동적인 구현에 대한 막연한 아디디어에서 출발한 작업은 플로토 타입을 제작하면서 여러가지 아이디어로 구체화 되었다. 엄밀하게 말하자면 오토마타 제작을 위한 아이디어 디벨롭 프로젝트이다.
처음 구동 아이디어가 잘떠오르지 않을때는 인형 부분과 동적 메커니즘을 구분하여 설계하는 방식으로 문제를 풀어 나갔다. 즉 인형을 먼저 만들어놓고 어떻게 움직일지 마리오네트처럼 움직임의 보형물을 덧대는 방식으로 생각하였다. 실제인 구동물로 구체화 되었을 때는 다음번에는 이 두분을 결합하여 간결화 시키는 구조물을 만들어보고 싶은 아이디어들이 많이 떠올랐다.
콘트롤박스, 구동구조물, 분리형 개체로 도킹 방식의 조립형으로 구성되는 형태는 처음에는 전혀 생각하지 못했다. 움직임을 어떻게 구현하여야 할지 방법도 알지 못하는데 전체 구조물을 구체화 하기는 어려웠다. 움직임의 구현이라는 1차적인 문제를 먼저 고민,해결하고 2차적으로 어떤구조로 디스플레이하지 하는 방식으로 접근하였다. 3차의 고민은 소재에 대한 고민 구동방식에 대한 고민이 될것이다.
실제 프로젝트를 진행하면서 지금 만들고 있는 실제작물에 관계된 아이디어이외에도 별개의 아이디어들이 더 많이 떠올랐다. 메커니즘의 형태를 띄는 오토마타 완구는 어떤 형태로 구성될 수 있을까. 스토리를 담고 있는 작품 형태 발전하면 어떤 작품이 될 수 있을까,
프로젝트 진행방향
이제야 어떤 형태의 구조물이 나오게 되었다. 이 정도의 불완전한 결과물을 만들어내는 데도 시간이 많이 걸리고 단계별로 문제점이 계속 생긴다. 그나마 그때 그때 운좋게 눈에 보이는 소재로 접근할 수 있는 빠른 방법으로 조형작업을 했기 때문에 형태라도 얻을 수 있었다. 그러지 않았다면 아직도 소재나 움직임에 대한 고민을 하고 있었을 것이다.
1.1차적으로 가동부를 원할하게 하는데 시간이 많이 필요하다. 지속적으로 시간로스가 많은 부분이다.
2. 다리에 대한 움직임은 방법을 찾았지만 머리 꼬리에 대한 움직임은 물리적으로 해결이 되지 않았다.
3. 오토마타 제어에 대한 부분은 피지컬 컴퓨팅으로 접근 가능한 방법을 학습하여 접근하도록 한다
하단 콘트롤 박스 제작 CNC 이용
제작과정 Computer-Controlled-Machining-03 실습참조

































제작진행중인 제작물 소개
구성
콘트롤박스+연결구동부+개체
분리 조립이 가능한 형태로 디자인 되어있다. 토킹 형태로 홈에 맞추어서 끼우기만 하면 된다.
작업물을 이동설치하거나 보관할 때도 용이하지만 연결부의 홈사이즈와 기어사이즈만 고려해서 만들면 각기 다른 형태의 디자인을 결합해서 사용할 수 있다. 따로 곰을 만들어서 같은 지지대를 사용할 수 있다. 콘트롤 박스는 그대로 사용하고 연결구동부를 다른 나무형태로 디자인하고 나무에 매달린 코알라를 만들 수 도 있는 것이다.
제어
콘트롤 박스를 다양한 형태의 오토마타에 활용한다고 가정하였을 때 상황에 맞추어 변경하여 제어할 요소들이 있다. 움직임의 속도 빛의 색 추가적인 움직임등은 오토마타의 각각의 상황에 따라 다를 것이다. 이 제어는 피지컬 컴퓨팅을 사용해 보도록 한다.
움직임의 속도 방향 - 모터콘트롤
빛의 색,속도,방향 - LED콘트롤
빛의 형태-PCB디자인
환경변화에 반응 - 움직임, 거리, 빛의 밝기
제어의 방식 - 아날로그 콘트롤, 블루투스제어,적외선리모트 콘트롤 등.































.

++ 빛을 활용하면 오토마타의 분위기도 다르게 연출할 수 있다. 빛 제어는 현재 적외석 콘트롤러로 색,강도는 가능하다.

++ 기어비를 이용하여 머리와 꼬리를 움직일 기어를 조립하였는데 생각처럼 쉽지 않다. 프레임이 튼튼하지 않다보니 조립의 어려움과 마찰이 생긴다.

++ 아크릴 커팅이 완전히 수직이 아니다. 기어를 몇겹 붙이다 보니 미세한 오차가 발생한다. 기어가 많이 물리다 보니 원할한 움직임에 문제가 생긴다.

++세운상가3층 명일?,금일모터에서 DC모터을 일단 급하게 구입했다. 중고처럼 보이는데 가격은 새거 같다. 직접만드신 모터인것 같기도 하고.. 일단 움직이면서 테스트하는게 좋을 것 같다.속도와 방향 정도만 제어가 가능하다. 저속모터 고속모터정도로 구분된다. 파워가 충분해서 좋다 . 모터의 속도는 전압으로 조정하는데 속도가 떨어지면 힘도 같이 떨어지는게 문제다. 토크가 충분하고 느리게 써야한다면 저속모터를 써야 한다는게 함정.모터는 다시 공부해야한다. 다양한 제어가 가능한 모터가 여러개인 콘트롤 박스도 생각해 보고 있어서 여러가지 모터를 써보는게 좋겠다.
++ CNC실습하기가 어렵다. 겨우 실습. 하지만 가장 많이 써보고 싶었던 기계. 일단 큰 구조물을 만들수 있고 다양한 재료와 다양한 방식으로 활용된다. 부조 입체물 조각까지는 해보고 싶은데 시간이 없다.